PCB 电路设计
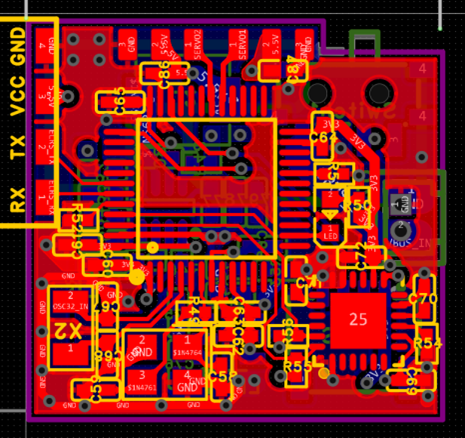
主控板正面
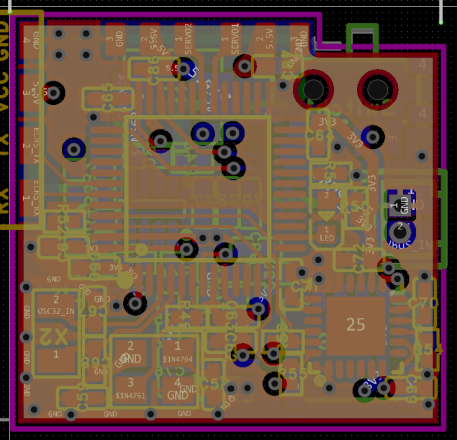
主控板背面
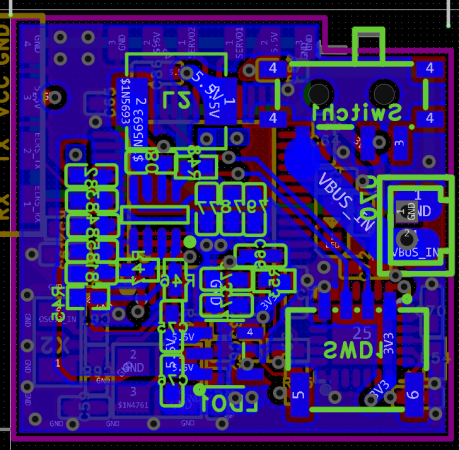
电源管理板
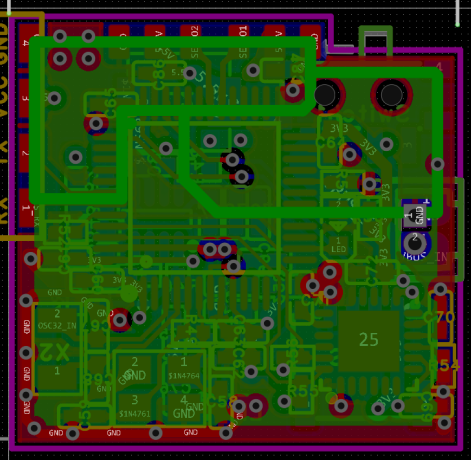
整体布局
机械结构 · 控制系统 · 飞行原理
整机飞行演示
仿生蝴蝶飞行器完整飞行过程展示
扑翼机构演示
舵机驱动扑翼机构运动过程
机械结构图
机体骨架采用"主梁-支撑杆"集中式布局,碳纤维杆件为主体材料,连接件采用 3D 打印轻质材料。重心下置布局形成钟摆效应,增强姿态回正能力。
四翼采用"碳纤骨架 + 柔性蒙皮"复合方案,前缘刚度高保证驱动力输入,后缘柔性大形成随流扭转,实现下扑增升、上挥减阻的仿生效果。
双舵机对称驱动,左右翅膀通过连杆机构实现同步反相运动。舵机角度关系:左 = 110° − 右,行程 0°~110°,中位 55°,最大振幅 55°。
碳纤骨架 柔性蒙皮 重心下置 双舵机驱动控制系统图
主控采用 ESP32-C3,通过 WiFi 接入云端网页平台,实现扑翼参数远程调节与传感器数据实时回传。OpenClaw 智能体在云端完成参数优化后下发至板端热更新。
ELRS CRSF 协议作为辅助通信链路,用于无网络环境下的现场手动操控与备用保障。起飞序列:CH3 拨上后自动 2 秒渐增到目标频率/振幅。
WiFi 云端主控 ELRS 辅助链路 OpenClaw AI飞行原理图
模仿蝴蝶低雷诺数飞行机理,翼面在下扑阶段充分展开增大受力面积产生主要升力,上挥阶段顺应气流收敛减小无效阻力。"刚柔耦合"的被动扭转特性是核心仿生要素。
正弦波形驱动保证运动平滑,2 秒缓启动斜坡避免机构冲击。工作频率 0~8 Hz,左右差动控制可形成滚转偏航耦合,为转向提供基础。
低雷诺数仿生 刚柔耦合 正弦波形 差动转向| 项目 | 当前方案/目标 |
|---|---|
| 主控芯片 | ESP32-C3 |
| 云端连接方式 | WiFi |
| 辅助通信方式 | ELRS |
| 驱动方式 | 双舵机扑翼驱动 |
| 扑翼开关 | 遥控通道触发 |
| 起飞渐增时间 | 2 s |
| 起飞目标频率 | 3 Hz |
| 起飞目标振幅 | 30° |
| 巡航振幅范围 | 0~55° |
| 巡航频率范围 | 0~8 Hz |
| 云端平台功能 | 参数调节、数据回传、训练监控、轨迹演示 |
| AI 功能 | 参数优化、训练可视化、策略辅助分析 |
| 传感器接口 | I2C 预留(BMI270 / BMP388 / INA3221) |
| 网页端功能 | 参数显示、波形观察、轨迹演示 |